The user has at their disposal a series of nine types of projections which can be generated quickly.
The projections can be sub-divided into two general categories: targetless and targeted projections.

TARGETLESS PROJECTIONS
- Sensor-to-Bit- Allows a projection to be strung to a bit from where your surveyed position is. From there you can append other kinds of projections to the end.
- MD & TVD- Hold a particular inclination and azimuth and goes in a straight path for the defined distance.
- Nudge- Mimics minimum curvature calculations but allows for the nudging of a variety of different user-defined parameters.
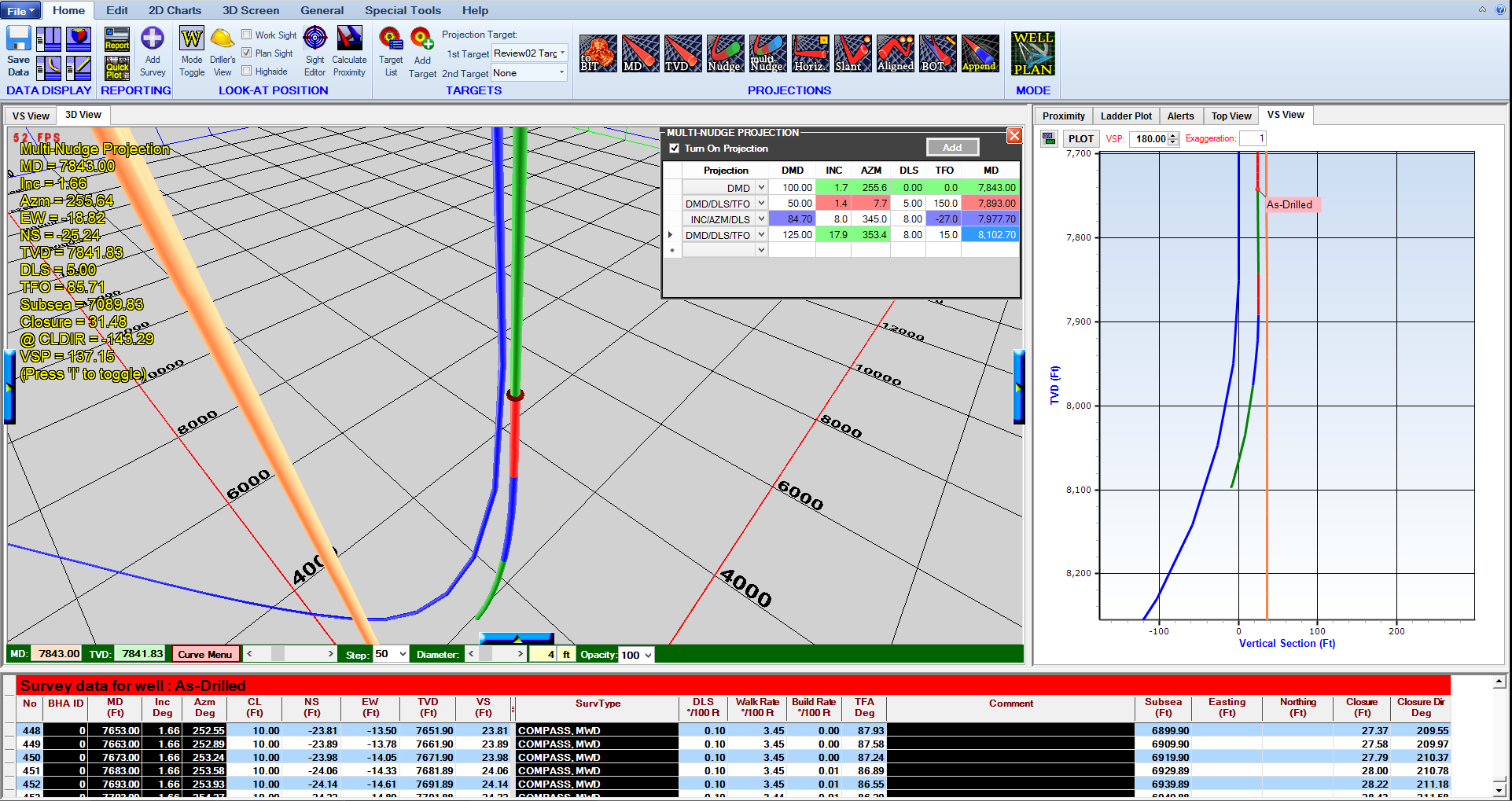
- Multi-Nudge- Designed for rotary steerable systems and calculates an unlimited number of Nudge projections end to end.
TARGETED PROJECTIONS
- Horizontal- Will project to a horizontal plane, which is considered a 2D target. Horizontal plane is defined by an RKBTVD, a max dip angle and a max dip direction.
- Slant a.k.a. DLS, Build-and-Hold- Can solve for a hold angle by providing a dogleg severity or solve for dogleg severity by providing a hold angle.
- Aligned- Set two dogleg severities, as well as desired inclination and azimuth at target.
- Back-on-Track (BOT)- Set two dogleg severities and a minimum distance in order to intersect your proposal.